操船システム
スーパーベクツインシステム

システムの概要
高い操縦性能を維持しながら、かつ、推進効率を高めることに成功
スーパーベクツインシステムは、ベクツインシステムの約50隻の納入実績から得た技術資料とその後の技術開発により、フィン取付け・舵形状・配置等に新しいコンセプトを適用したものです。
これによりベクツインシステム特有の高い操縦性能を維持しながら、かつ、推進効率を高めることに成功しました。
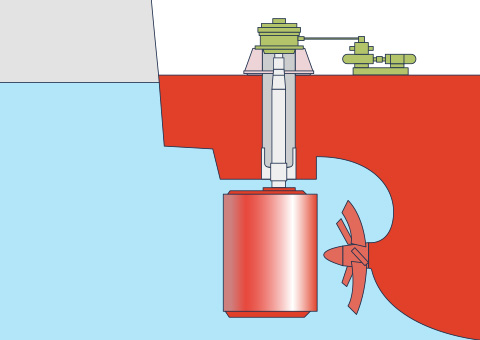
スーパーベクツインシステムは、一個の固定ピッチプロペラの後ろに左右対称に配置した一対のシリング舵を、様々な舵角の組み合わせを取ることによって、プロペラは前進回転一定のまま、前後進や左右旋回はもとより後進しながらの操船もできます。
操船方法の仕組みは、ジョイスティックの操作で、舵角の組み合わせを変えてプロペラ後流を制御し、全方向にわたって推力を発生させ制御できるようになっています。
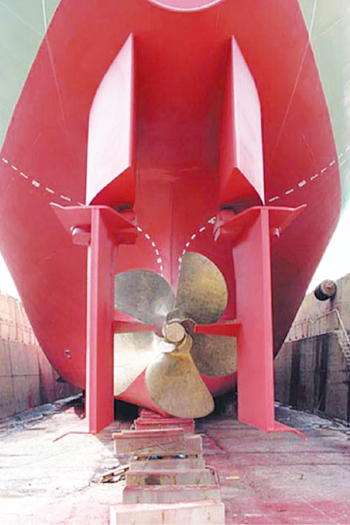
べクツイン舵がプロペラ後流を囲み込むように配置されているため、波による推力変動が少ない上に、直進航行における針路安定性がよいので、海象変化による馬力損失や船速の低下が少なくなります。
特に追波中の航行にもヨ一イングが少なく、安全だとの評価を頂いています。
出入港や離着桟が簡単に短時間で出来るので、乗組員の精神的・肉体的疲労を軽減し、総合的に見て優れた経済効果をもたらすシステムです。
スーパーベクツインシステムは、マニュアル操船を基準としていますが、ご要望に応じてダイナミックポジショニングを含め、各種自動化システムと接続できます。
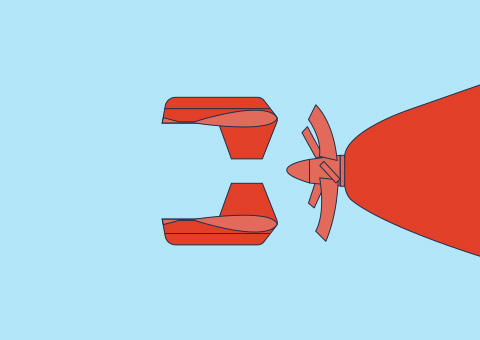
スーパーベクツインシステム舵概略図
特徴
スーパーベクツインシステムでは、航行中のプロペラ後流が素通りする二枚舵の内舷側の面にそれぞれ設けたリアクションフィンにより、プロペラ後流を整流し、回転エネルギー損失を回収することによって推進効率を高めます。
また、プロペラのハブ渦損失を解消するプロペラボスキャップフィン(PBCF)をシステムに組み入れることで推進効率をさらに向上させることができます。
スーパーベクツインシステムの優れた操船性はジョイスティックの操縦によって発揮されます。
プロペラが前進回転のままで、船を所定の位置に保持できるホバリング機能があります。
ホバリング状態からジョイスティックを左右に動かせば、前後進をともなわずに船の姿勢制御ができます。
プロペラ前進回転一定のまま、船速を自由に加減でき低速時や停止中でも舵効きが良く、前進から後進にいたる全領域にわたって自由自在に船を操縦することができます。
船尾のべクツイン舵により、全方向への推力が発生できるので、バウスラスターとの組み合わせ操作で平行移動・斜め移動・その場旋回も簡単に行え、操船に対する自由度が飛躍的に向上します。
なお、小型船の場合は、特にバウスラスターを設けなくても、スーパーベクツインシステムの優れた操船機能により容易に操船が行えます。
中央のジョイスティックには、通常航海中の安全性をより一層高めることを考慮し、新しく緊急停止スイッチを設けました。
このスイッチを押すだけで操舵モードかオートパイロット/手動操舵のどちらの状態でも、船は緊急停止ができます。
この場合の停止距離は従来船の約半分に短縮されます。
このような緊急停止の作動中でも、ジョイスティックを操作すればべクツインの特性を生かした操船が直ちに行え、危険回避に威力を発揮します。
スーパーベクツイン舵 リアクションフィン付
(特許取得済み)
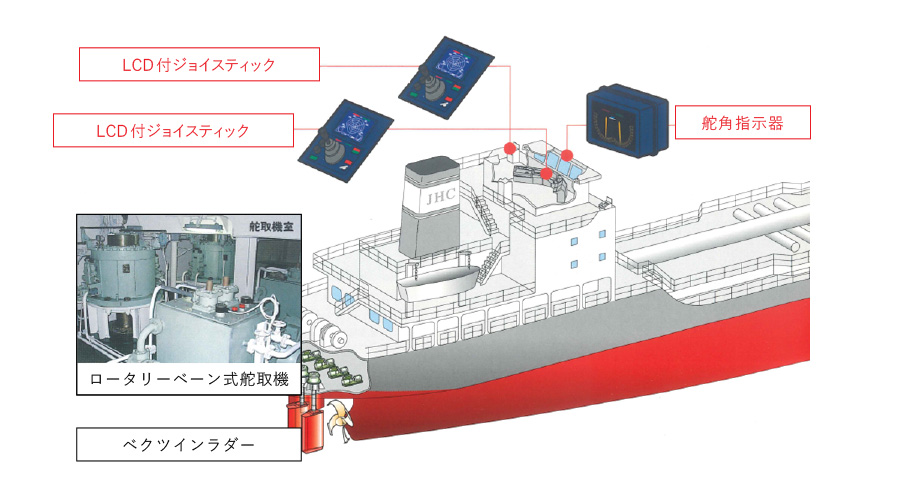
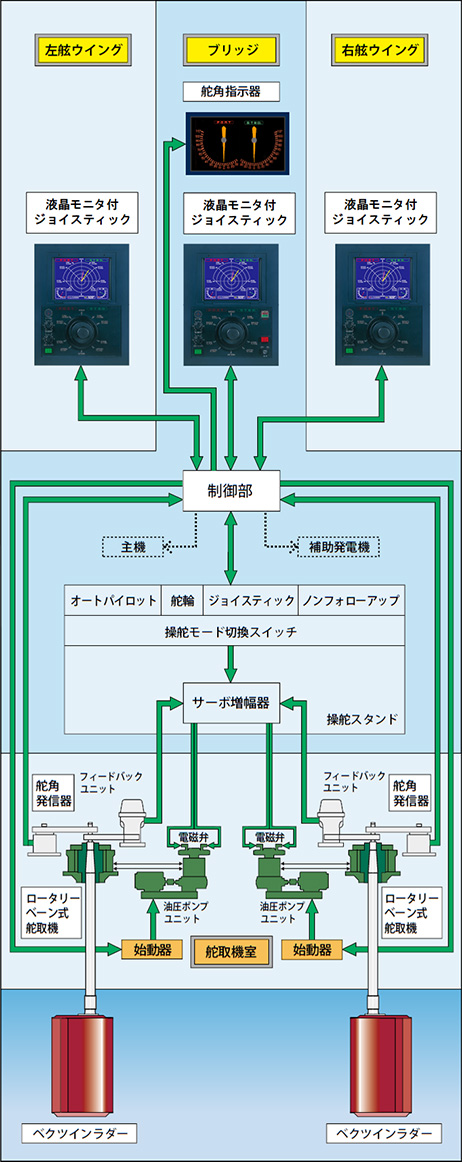
システムの構成
操縦系統は、ジョイスティックから制御部、操舵スタンド内のサーボ増幅器を経由し、油圧ポンプユニットからロータリーベーン式舵取機を作動させて、ベクツイン舵を動作させるように構成されています。
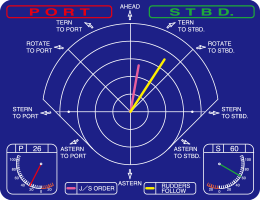
ジョイスティックは、推力ベクトルの表示ができる液晶モニタ付ジョイスティックにより設定していただけます。
ホバリング位置表示ランプを新設いたしましたのでホバリング(基準舵角)の確認がランプとブザーによって容易に行えます。
操舵室内の舵角指示器は、夜間見やすいように設計されています。
制御部は、デジタル信号にて処理されていますので精度が良く、雑音に強いシステムになっています。
舵取機は、ラムシリンダー方式に比べ小型・軽量のロータリーベーン方式を採用しています。
べクツイン舵の動作範囲は、外側へ105度、内側へ35度になっています。
システム特有の舵角の組み合わせは、ジョイスティックにより自動的にできるようになっています。
- 推力ベクトル表示
液晶モニタ付ジョイスティック -
- 液晶モニタ付きジョイスティック装置は、推力ベクトルを表示するモニターを設けています。
これによって、ベクツイン特有の舵角とその組み合わせによって得られる全方向への推力ベクトルが表示されます。 - 画面には、ジョイスティックの指示と舵の動き(転舵による推力の大きさ・作用方向)の両方が表示されますので操船が確実、且つ容易に行えます。
- 推力は、プロペラ回転数が高いほど大きくなります。
推力ベクトル表示側

推力ベクトル表示
CRT付ジョイスティック - 液晶モニタ付きジョイスティック装置は、推力ベクトルを表示するモニターを設けています。
総合系統図
ジョイスティックの基本パターン
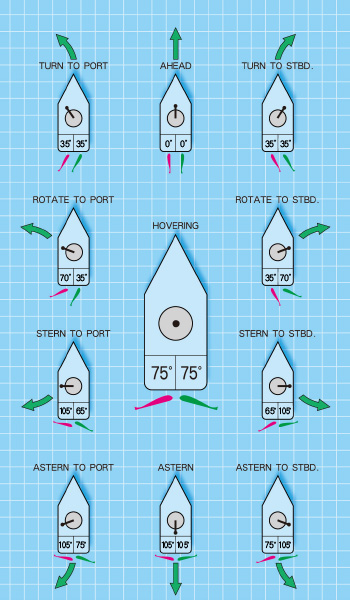
ジョイスティックの基本操作における舵角の組み合わせと船の運動方向は図のようになります。
なお、実船においては、船型・喫水・船速等によっても対応舵角が多少変わることがありますので船の動きを見ながら微調整してください。
ジョイスティックの傾きを加減することによって舵角が加減されますので推力の値も変わり、船速や旋回力を思いのままに自由に変えることができます。

- ジョイスティックの位置

- 船体運動方向
※数値は、基準舵角ですので操船状況により加減してください。
シミュレーションを見る
水槽試験
ベクツインシステムにリアクションフィンを設けたスーパーベクツインシステムにおける推進効率の改善度を調べるために、大型模型船による水槽実験を行いました。
- 実験設備
(株)ジャパンテクノメイト水槽
- 模型仕様
-
長さ(m) 7.80 プロペラ直径(m) 0.25 舵 ベクツイン舵リアクションフィン有り・無し 舵寸法 幅×高さ(m) 0.20×0.26
- 実験結果
ベクツインシステムに比べてスーパーベクツインシステムは、推進効率が約4%向上した。
実船比較
スーパーベクツインシステムは、運輸施設整備事業団殿・日本タンカー(株)殿共有の6,000kl積タンカー「第二十一日丹丸」(内海造船(株)瀬戸田工場建造)に初めて採用して頂き、海上試験運転において好成績をおさめました。
| 第二十一日丹丸 | 在来船 | |
|---|---|---|
| 主要寸法Lpp×B×D(m) | 97.0×16.0×7.7 | 同左 |
| 満載喫水(m) | 6.48 | 6.44 |
| 主機MCO(kw) | 4.200 | 3.900 |
| プロペラ | FPP+PBCF | 同左 |
| プロペラ直径(m) | 3.6 | 同左 |
| 舵面積(m2) | 21.75 | 同左 |
| 試運転速力(knots) | 15.86 | 15.60 |
| 竣工 | 2001年9月 | 1996年8月 |
| 建造造船所 | 内海造船(株)瀬戸田工場 | 同左 |
- 海上公試運転成績
-
ベクツインシステムを搭載した同一の船型線図・主要寸法の在来船と海上公試運転の結果を比較した結果、スーパーベクツインシステムを搭載した「第二十一日丹丸」は、約3.5%の効率アップ(BHPの減少)を示した。
また今治造船(株)にて建造された旭タンカー(株)殿所有「旭竜丸」においても同様に約3.5%の効率アップが確認され好評を得ました。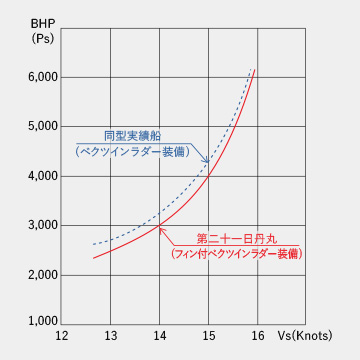
海上公試運転解析比較
BHP(Brake Horsepower)カーブ
航跡比較
スーパーベクツインは、リアクションフィンの整流効果により、従来のベクツインに比べ後流の乱れが非常に少なく航跡も短いことが確認できます。

「第二十一日丹丸」
4/4速力試験時の航跡

リアクションフィン無し
4/4速力試験時の航跡